

本記事はNintendo Switchソフト『ナビつき!つくってわかる はじめてゲームプログラミング』の「ナビつきレッスン」レッスン6の攻略情報をまとめたものです。レッスン6ではヒト対AIのレーシングゲームをプログラミングしていきます。
エキサイトレーシングを作る
 | レッスン6「エキサイトレーシング」 プレイヤーvs自動運転AIのデッドヒート!キミのプログラミングでクルマを走らせよう!! クリア時間の目安:約60分 |
| レッスン6で新登場するノードン | ||
|---|---|---|
 クルマ クルマ |
 自分メモ 自分メモ |
 スタートした スタートした |
| 追加されるノードンガイド | |
|---|---|
| ステップ1 | ブルルン ブルルン クルマノードン |
| ステップ3 | モノの区別をつけるしくみ |
| 勝敗判定プログラムのしくみ | |
| ステップ5 | 自動運転プログラムのしくみ |
| 数つきモノノードンでデバッグ!? | |
| ステップ6 | カウントダウンのプログラムのしくみ |
ノードンガイドの一覧はこちら。

ステップ1:クルマを走らせよう!
| ステップ1に登場するノードン | ||
|---|---|---|
| クルマ |
 カメラ カメラ |
 ボタン ボタン |
 けいさん けいさん |
 スティック スティック |
 ワールド ワールド |
レースと言えばクルマ。ステップ1ではクルマを走らせる仕組みを作ります。
| 手順 | やること |
|---|---|
| 1 | 上から視点に変更する |
| 2 | モノからクルマノードンを呼び出しスタート地点に置く |
| 3 | 入力からYのボタンノードンを呼び出す |
| 4 | ボタンノードンをクルマノードンのアクセルポートにつなぐ |
| 5 | 入力からLの左右のスティックノードンを呼び出す |
| 6 | スティックノードンをクルマノードンのハンドルポートにつなぐ |
| 7 | クルマノードンの設定を開き、 └移動スピードを0.50 └位置をYの0.40m |
YボタンとLスティックで操作可能なクルマが登場しました。
カメラがクルマを追う
レースゲームは前へ前へ進むゲームなので、カメラが固定ではすぐにクルマを見失います。そこでカメラがクルマの後ろを追って来るようプログラミングします。
| 手順 | やること |
|---|---|
| 1 | クルマノードンを180°回転させる |
| 2 | モノからカメラノードンを呼び出しクルマの後ろに置く |
| 3 | カメラノードンとクルマノードンをれんけつする |
| 4 | カメラノードンの設定を開き、 └カメラ画角を60.00 └Y軸回転追従を「追従する」にする └ずらすキョリのY:0.50m └ずらすキョリのZ:3.00m |
GO!GO!アスレチックで登場したゲーム画面ノードン同様に、カメラノードンも連結することで他のノードンに付いていくようになります。設定も変更して、レースしやすい画面になりました。
クルマをバックさせる
Bボタンでバックできるようプログラミングしましょう。クルマノードンのアクセルポートにマイナスの数を入力するとバックやブレーキになります。
| 手順 | やること |
|---|---|
| 1 | 入力からBのボタンノードンを呼び出す |
| 2 | 中間から-のけいさんノードンを呼び出す |
| 3 | Yのボタンノードンをけいさんノードンの入力1ポートにつなぐ |
| 4 | Bのボタンノードンをけいさんノードンの入力2ポートにつなぐ |
| 5 | クルマノードンとYのボタンノードンのワイヤーを解除する |
| 6 | けいさんノードンとクルマノードンのアクセルポートをつなぐ |
けいさんノードンを使い、ボタンノードン2体の出力を「Y-B」と引き算し、Yボタンを押した時は1が出力され、Bボタンを押した時は-1が出力されるようになりました。これでクルマノードンは前・後ろ・左右に自在に動けるようになります。
- Yボタン:アクセル
- Bボタン:バック/ブレーキ
- Lスティック:ハンドル
ワールドを砂漠に変更
| 手順 | やること |
|---|---|
| 1 | モノからワールドノードンを呼び出す |
| 2 | ワールドの設定→みためを「すな」にする |
これで砂漠を自在に走るクルマになりました。
ステップ2:ゴールを作ろう!
| ステップ2に登場するノードン | ||
|---|---|---|
 モノ モノ |
 定数 定数 |
 さわっているセンサー さわっているセンサー |
 タイマー タイマー |
 エフェクト エフェクト |
 リトライ リトライ |
ステップ2ではゴールラインと対戦相手をプログラミングします。
ゴールラインを作る
| 手順 | やること |
|---|---|
| 1 | モノから直方体のモノノードンを呼び出す |
| 2 | 離れた場所にゴールラインの形に調整して置く |
| 3 | モノノードンの設定を開き、 └ふるまいは見えるだけオン └おおきさのYを0.10m └位置のYを0.00m |
| 4 | モノからさわっているセンサーを呼び出しゴールラインに置く |
| 5 | 触っているセンサーの設定を開き、 └ふるまいの見えるをオフ └何をチェックする?をクルマのみオン |
| 6 | モノからクラッカーのエフェクトノードンを呼び出す |
| 7 | さわっているセンサーとエフェクトノードンをつなぐ |
直方体のモノノードンがゴールラインになり、その上に触っているセンサーを置くことで、クルマが通過した際に触っているセンサーがシグナルを出力し、エフェクトノードンがクラッカーを鳴らすという仕組みです。
自動で動く対戦相手
| 手順 | やること |
|---|---|
| 1 | クルマノードンをコピーして横に並べる |
| 2 | プレイヤーのクルマを赤に、対戦相手のクルマを水色に色変更する |
| 3 | 対戦相手の設定→いどうスピードを0.45にする |
| 4 | 入力から定数ノードンを呼び出す |
| 5 | 定数ノードンを対戦相手のアクセルポートにつなぐ |
定数ノードンをクルマのアクセルポートにつなぐと、自動で真っすぐ走り出します。
ゴールでリトライする
| 手順 | やること |
|---|---|
| 1 | 出力からタイマーノードンを呼び出しゴール地点に置く |
| 2 | 触っているセンサーとタイマーノードンをつなぐ |
| 3 | 出力からリトライノードンを呼び出す |
| 4 | タイマーノードンとリトライノードンをつなぐ |
すっかりお馴染みの自動リトライです。プレイヤーか対戦相手か、どちらかのクルマがゴールを通過した瞬間、触っているセンサーノードンからシグナルが出て、1秒後にリトライします。
ステップ3:勝ち負けを判定しよう!
| ステップ3に登場するノードン | |||
|---|---|---|---|
| 自分メモ |
 オシャレなモノ オシャレなモノ |
エフェクト |
 フラグ フラグ |
 NOT NOT |
 ワイヤー入口 ワイヤー入口 |
 ワイヤー出口 ワイヤー出口 |
 AND AND |
前回のステップでゴールと対戦相手をプログラミングしました。ステップ3ではゴールに勝敗判定の仕組みを加えて、どちらが勝ったか分かるようにします。
クルマを見分ける
まず、ゴール地点の触っているセンサーノードンはクルマをチェックしているので、どっちのクルマが通過してもシグナルを出します。これを改造して、プレイヤーと対戦相手のクルマを見分けられるようにしましょう。
| 手順 | やること |
|---|---|
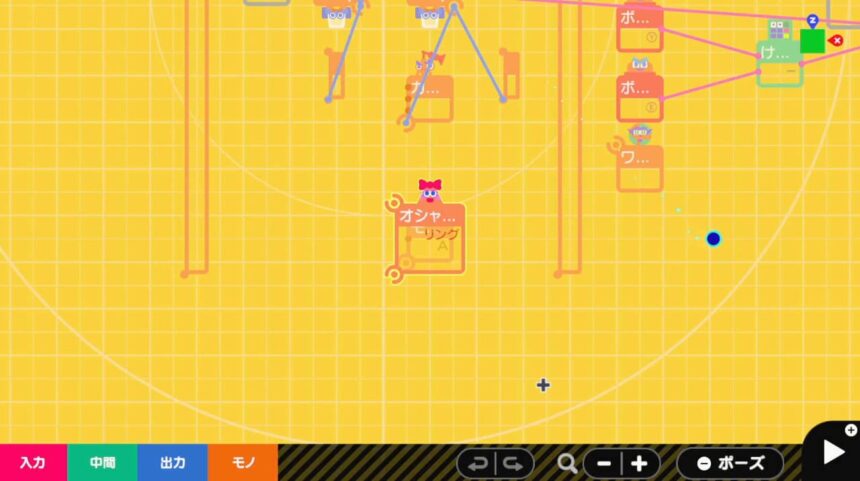
| 1 | モノからJoy-Con(R)のオシャレなモノノードンを呼び出す |
| 2 | オシャレなモノノードンをプレイヤーのクルマにれんけつする |
| 3 | オシャレなモノノードンの設定を開き、 └れんけつ面を中央/中央 └ふるまいを動くのみオン |
見えないオシャレなモノがクルマと連結しました。この「見えない」オシャレなモノを使うというのが、クルマを見分けるカギになります。
| 手順 | やること |
|---|---|
| 1 | ゴール地点の触っているセンサーの設定→何をチェックする?をJoy-Con(R)のみオンにする |
これで、触っているセンサーがクルマではなく、Joy-Con(R)をチェックします。相手がゴールしても何も起きず、プレイヤーがゴールした時にクラッカーが鳴ります。
対戦相手も同じようにプログラミングします。
| 手順 | やること |
|---|---|
| 1 | オシャレなモノをコピーし設定→見た目をJoy-Con(L)にする |
| 2 | Joy-Con(L)をサイズ調整して対戦相手とれんけつする |
| 3 | ゴール地点へ移動し、触っているセンサーをコピーする |
| 4 | 触っているセンサーを少しズラしてゴールラインに重ねる |
| 5 | コピーの触っているセンサーの設定→何をチェックする?をJoy-Con(L)にする |
ゴール地点に、Joy-Con(R)とJoy-Con(L)をそれぞれチェックする触っているセンサーが設置されました。
- 最初の触っているセンサー:プレイヤーに連結したJoy-Con(R)をチェック
- コピーの触っているセンサー:対戦相手に連結したJoy-Con(L)をチェック
失敗のエフェクトを追加
プレイヤーがゴールした時のクラッカーのエフェクトはそのままにしておいて、Joy-Con(L)をチェックしている触っているセンサーに失敗のエフェクトを加えます。
| 手順 | やること |
|---|---|
| 1 | モノからしっぱいのエフェクトノードンを呼び出す |
| 2 | 触っているセンサーとエフェクトノードンをつなぐ |
相手がゴールすると失敗のエフェクトが出て、レースに負けたことが分かるようになりましたね。ただ、これだけではまだ不十分です。プレイヤーと対戦相手がほぼ同時にゴールした時に、両方のエフェクトが出てしまう問題を解消する必要があります。
自分メモを活用
勝ちのときの動作部分と、負けのときの動作部分に分けてプログラミングしていきます。ちょっと複雑な仕組みのため、自分メモノードンを活用してプログラムを整理しましょう。
| 手順 | やること |
|---|---|
| 1 | 中間から自分メモノードンを呼び出す |
| 2 | 自分メモを拡大して設定→編集から「勝ち」と入力する |
| 3 | 自分メモノードンをコピーして真下に設置する |
| 4 | コピーの自分メモの設定→編集から「負け」と入力する |
勝ちの自分メモノードンの中に勝利の動作、負けの自分メモノードンの中に敗北の動作をプログラミングします。こうすることで一目で何のプログラミングか見分けられます。
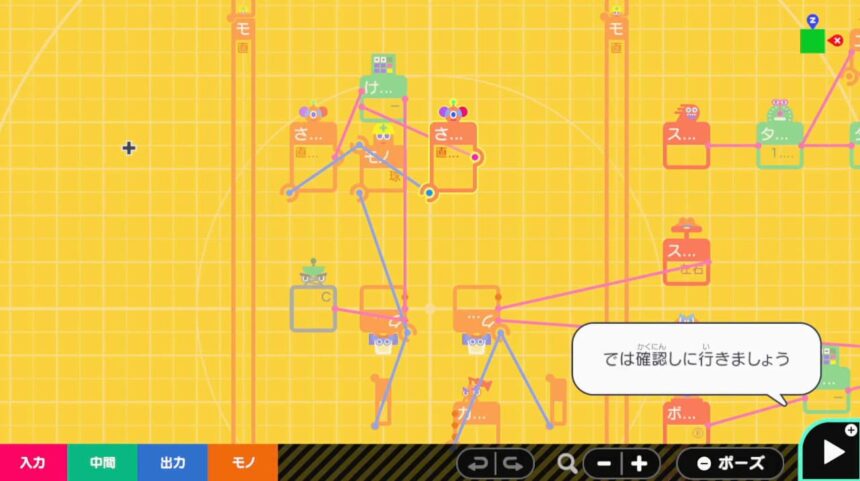
勝敗判定
ここからが本題。勝敗判定とはつまり、プレイヤーが先にゴールしたか、対戦相手が先にゴールしたかなので、プレイヤーがゴールしたらオンになるフラグノードンと、対戦相手がゴールしたらオンになるフラグノードンをプログラミングしていきます。
| 手順 | やること |
|---|---|
| 1 | 中間からフラグノードンを呼び出して「勝ち」の自分メモの中へ |
| 2 | 中間から別のフラグノードンをを呼び出し「負け」の自分メモの中へ |
では、勝ちと負け、それぞれ作っていきましょう。複雑なのでワイヤーワープ入口/出口にも登場してもらいます。
勝ちのフラグノードンをプログラミング
プレイヤーが勝つというとは、以下の2つの条件が満たされた時です。
- 対戦相手がまだゴールしていない
- プレイヤーがゴールした
2つのことをチェックするためANDノードンを使います。
| 手順 | やること |
|---|---|
| 1 | 中間からANDノードンを呼び出す |
| 2 | ANDノードンとフラグノードンのオンポートをつなぐ |
| 3 | 触っているセンサーをANDノードンの入力2ポートにつなぐ |
以上で条件の1つ「プレイヤーがゴールした」ときに、ANDノードンの入力ポートにシグナルが入力されます。
次は「対戦相手がゴールしていない」ときにシグナルを出す方法ですが、これには、対戦相手が先にゴールしたらオンになる予定のノードンを利用します。つまり、「負け」の中に設置したフラグノードンを使います。
| 手順 | やること |
|---|---|
| 1 | 中間からワイヤーワープ入口を呼び出し「負け」のフラグノードンの近くに置く |
| 2 | 「負け」のフラグノードンをワイヤーワープ入口につなぐ |
| 3 | 中間からワイヤーワープ出口を呼び出し「勝ち」の枠の中に置く |
| 4 | 中間からNOTノードンを呼び出し「勝ち」の枠の中に置く |
| 5 | ワイヤーワープ出口とNOTノードンをつなぐ |
| 6 | NOTノードンをANDノードンの入力1ポートにつなぐ |
NOTノードンは入力の逆を出力するので、対戦相手がまだゴールしていない時にシグナルを出します。
これで「対戦相手がまだゴールしていない」「プレイヤーがゴールした」の条件が揃ったときに、フラグノードンがオンになる仕組みができました。これにクラッカーのエフェクトノードンをつなぎ直せば、勝ちの判定の完成です。
| 手順 | やること |
|---|---|
| 1 | 触っているセンサーとクラッカーのエフェクトノードンのワイヤーを解除する |
| 2 | エフェクトノードンを「勝ち」の枠の中に移動する |
| 3 | フラグノードンをエフェクトノードンとつなぐ |
負けのフラグノードンをプログラミング
同じように「対戦相手が先にゴール」したときに「負け」のフラグノードンがオンになる仕組みを作ります。
| 手順 | やること |
|---|---|
| 1 | 中間からANDノードンを呼び出す |
| 2 | ANDノードンとフラグノードンのオンポートをつなぐ |
| 3 | 触っているセンサーをANDノードンの入力2ポートにつなぐ |
| 4 | 中間からワイヤーワープ入口を呼び出しワープIDをBにする |
| 5 | ワイヤーワープ入口(B)を「勝ち」のフラグノードンの近くに置く |
負けの判定に使うワイヤーワープ入口/出口のワープIDは、必ず勝ち判定とは違うIDを設定してください。
| 手順 | やること |
|---|---|
| 1 | 「勝ち」のフラグノードンをワイヤーワープ入口(B)につなぐ |
| 2 | 中間からワイヤーワープ出口を呼び出しワープIDをBにする |
| 3 | ワイヤーワープ出口(B)を「負け」の枠の中に置く |
| 4 | 中間からNOTノードンを呼び出し「負け」の枠の中に置く |
| 5 | ワイヤーワープ出口とNOTノードンをつなぐ |
| 6 | NOTノードンをANDノードンの入力1ポートにつなぐ |
| 7 | 触っているセンサーと失敗のエフェクトノードンのワイヤーを解除する |
| 8 | エフェクトノードンを「負け」の枠の中に移動する |
| 9 | フラグノードンをエフェクトノードンとつなぐ |
勝ち判定の鏡映しで負けの判定が完成しました。ゲーム画面で相手が勝ったときと、自分が勝ったときとで演出が異なることを確認してくださいね。
リトライの仕組みを変更
| 手順 | やること |
|---|---|
| 1 | リトライノードンとタイマーノードンを右側に移動させる |
| 2 | 触っているセンサーとタイマーノードンをつなぐワイヤーを解除する |
| 3 | 勝ちのフラグノードンをタイマーノードンにつなぐ |
| 4 | 負けのフラグノードンをタイマーノードンにつなぐ |
これで勝敗判定の完成です。
ステップ4:コースを作ろう
| ステップ4に登場するノードン |
|---|
| モノ |
ステップ4ではレースゲームで最も大事なコースをプログラミングします。
| 手順 | やること |
|---|---|
| 1 | モノから直方体のモノノードンを呼び出す |
| 2 | 直方体のモノの設定は、 └大きさX:0.40m/Y:0.40m/Z:10.00m └位置のY:0.20m └ふるまいは見える・当たるだけオン |
| 3 | 直方体のモノをコピーして壁を作っていく |
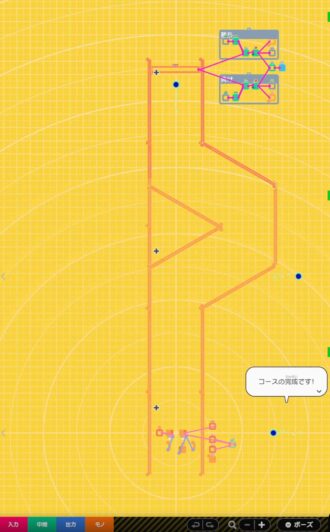
最初に左側の直線の壁を作り、次に右側にカーブする壁を作り、コースにします。何もなかった砂漠に立派なコースが出来ました。
ステップ5:レッツ自動運転!
| ステップ5に登場するノードン | |||
|---|---|---|---|
| さわっているセンサー |
 数つき 数つき |
モノ |
けいさん |
今回のステップでは対戦相手の自動運転を改良します。というのも、今の対戦相手のプログラムでは、ただ真っすぐ進むばかりで、コースの壁にぶつかってしまうからです。ちゃんとコーナーを曲がるよう、バージョンアップさせましょう。
まずは準備。相手の動きを確認しやすいよう、相手のクルマにカメラがついていくようにします。
| 手順 | やること |
|---|---|
| 1 | プレイヤーのクルマノードンとカメラノードンのれんけつを解除する |
| 2 | 相手のクルマノードンとカメラノードンをれんけつする |
これでカメラが対戦相手のクルマを追尾するようになります。
自動で右に曲がる仕組み
まずは、クルマの目の前に壁があったら右に曲がるようプログラミングします。使うのは触っているセンサーノードンです。
| 手順 | やること |
|---|---|
| 1 | モノからさわっているセンサーノードンを呼び出し対戦相手のクルマの前に置く |
| 2 | さわっているセンサーノードンを設定は、 └大きさのYを0.40m └れんけつ面をZ+/Z- |
| 3 | さわっているセンサーノードンを対戦相手のクルマノードンとれんけつする |
| 4 | さわっているセンサーノードンを対戦相手のクルマノードンのハンドルポートにつなぐ |
触っているセンサーノードンが正面の障害物に当たったら、センサーが反応して右に曲がるようになりました。
左に曲がるプログラミングを始める前に、触っているセンサーが「いつ反応しているか」分かりやすくしてみましょう。
| 手順 | やること |
|---|---|
| 1 | モノから数つきモノノードンを呼び出す |
| 2 | 数つきモノノードンの設定は、 └ふるまいの見える・動くだけオン └整数ケタは1 └大きさのYを0.40m |
| 3 | 数つきモノノードンを対戦相手のクルマノードンとれんけつする |
| 4 | さわっているセンサーノードンと数つきモノノードンをつなぐ |
さわっているセンサーノードンが出力している数をゲーム画面で確認できるようになりました。障害物が何もない場所では数字は0、正面に壁が近づくと1になってクルマが右に曲がるはずです。
この数つきノードンの仕組みはあくまでプログラムのお手伝いなので、ゲーム完成時には解除しますが、目に見えないシグナル(数字)を可視化する方法として、覚えておくと良いですね。
クルマが左右に曲がる仕組み
さわっているセンサーノードンを2つに増やして、クルマが左右に曲がれるようにします。

クルマの左前には右に曲がるためのセンサー、右前には左に曲がるためのセンサーを取り付けます。そのため、さわっているセンサーノードンの連結を変えて、少し左にズラし、右に曲がるためのセンサーを作ります。
| 手順 | やること |
|---|---|
| 1 | さわっているセンサーノードンとクルマノードンのれんけつを解除する |
| 2 | さわっているセンサーノードンを左にズラす |
| 3 | モノから球のモノノードンを呼び出しクルマの前に置く |
| 4 | 球のモノノードンの設定は、 └ふるまいは動くだけオン └れんけつ面をZ+/Z- |
| 5 | 球のモノノードンをクルマノードンとれんけつする |
| 6 | さわっているセンサーノードンの設定→れんけつ面をX-/X+に変更する |
| 7 | さわっているセンサーノードンを球のモノノードンとれんけつする |
左右に曲がるための左前のセンサーが設置できました。次は右前にセンサーを取り付けます。
| 手順 | やること |
|---|---|
| 1 | さわっているセンサーノードンをコピーして反対側に置く |
| 2 | コピーのさわっているセンサーノードンのれんけつ面をX+/X-に変更する |
| 3 | さわっているセンサーノードンを球のモノノードンにれんけつする |
ここまでは右に曲がるための仕組みと同じですが、このまま素直にセンサーを取り付けると、プラスの数がハンドルポートに入力されて「右」に曲がってしまいます。左に曲がるには、クルマのハンドルポートにマイナスの数を入力する必要があります。
- 右に曲がる時はハンドルにプラスの数字を入力
- 左に曲がる時はハンドルにマイナスの数字を入力
このルールは絶対なので、けいさんノードンに登場してもらいます。
| 手順 | やること |
|---|---|
| 1 | 中間から-のけいさんノードンを呼び出す |
| 2 | 左側のさわっているセンサーとクルマノードンをつなぐワイヤーを解除する |
| 3 | 左側のさわっているセンサーをけいさんノードンの入力1ポートにつなぐ |
| 4 | 右側のさわっているセンサーをけいさんノードンの入力2ポートにつなぐ |
| 5 | けいさんノードンの出力をクルマノードンのハンドルポートにつなぐ |
-のけいさんノードンは入力1ポートの数字から入力2ポートの数字を引いた数を出力します。左側のセンサーが触れると1-0=1の数を出力するのでクルマは右に曲がり、右側のセンサーが触れると0-1=-1が出力され、その数はマイナスなのでハンドルは左に曲がります。
数つきモノノードンの連結を変えて、2つのセンサーによるシグナルの違いを確認できるようにしてみましょう。
| 手順 | やること |
|---|---|
| 1 | さわっているセンサーと数つきモノノードンをつなぐワイヤーを削除する |
| 2 | けいさんノードンと数つきモノノードンをつなぐ |
これでクルマを走らせると、障害物がない間は数字の0、壁にぶつかりそうになると数字が1になって右に曲がり、次の壁に当たりそうになると数字が-1になって左に曲がることが確認できます。
人間が操作していないのに左右に勝手に曲がってくれる自動運転AIの完成です。
最後に対戦相手に取り付けたカメラノードンを、プレイヤーのクルマに連結し直してステップ6クリアです。
ステップ6:3! 2! 1! GO!
| ステップ6に登場するノードン | |||
|---|---|---|---|
| フラグ |
スタートした |
エフェクト |
タイマー |
| けいさん |
ワイヤー入口 |
ワイワー出口 |
– |
ステップ6では、スタート時の緊張感を高めるため、カウントダウンをプログラミングします。ゲームが始まったらカウントダウンが始まる仕組み。それにはゲームが始まったことを伝えるノードン、スタートしたしゅんかんノードンが必要です。
スタート時にカウントダウンする
| 手順 | やること |
|---|---|
| 1 | 入力からスタートしたしゅんかんノードンを呼び出す |
| 2 | モノから3カウントのエフェクトノードンを呼び出す |
スタートしたしゅんかんノードンはゲームが始まった1フレームだけシグナルを出力し、そのあとは何も出力しなくなるノードンです。このスタートしたしゅんかんに3カウントのエフェクトノードンを繋げば、カウントダウンの仕組みは完成なのですが、いきなりカウントダウンが始まるより、心の準備をする時間の余裕が欲しいですよね。
そこで、タイマーノードンを使ってカウントダウンスタートまで一呼吸置くようにします。
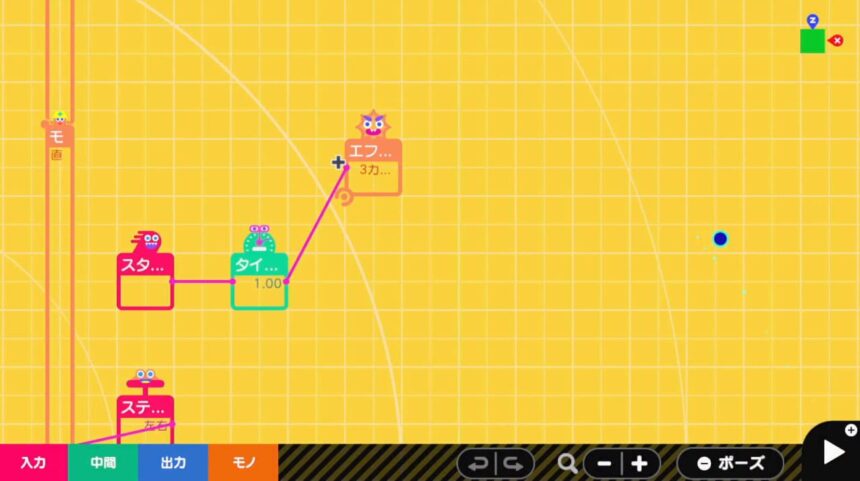
| 手順 | やること |
|---|---|
| 1 | 中間からタイマーノードンを呼び出す |
| 2 | スタートしたしゅんかんノードンをタイマーノードンにつなぐ |
| 3 | タイマーノードンをエフェクトノードンにつなぐ |
無事にカウントダウンの仕組みができました。次は対戦相手がカウントダウンを待って走り出すよう、プログラムし直します。
カウントダウンを待ってスタート
3カウント後にスタートなので、カウントダウン開始から3秒待つよう、クルマノードンを改良します。
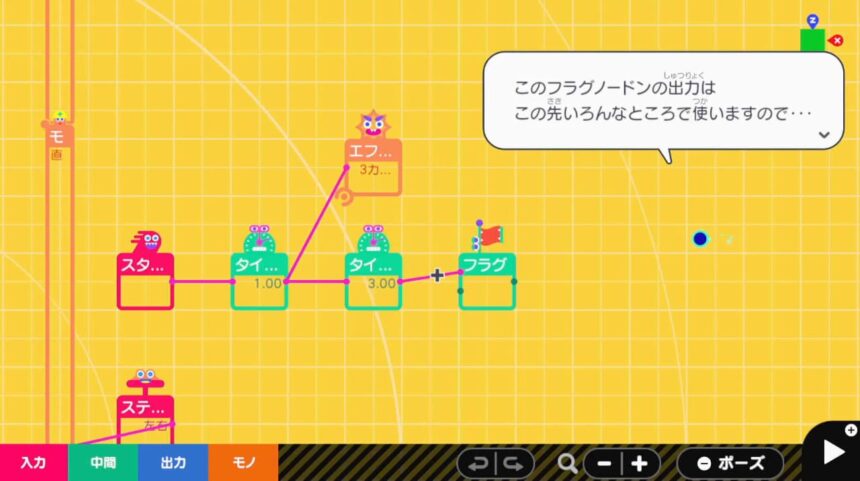
| 手順 | やること |
|---|---|
| 1 | 中間からタイマーノードンを呼び出す |
| 2 | タイマーノードンの設定→何秒後に出力するかを3.00にする |
| 3 | 2つのタイマーノードンをつなぐ |
| 4 | 中間からフラグノードンを呼び出す |
| 5 | 3.00のタイマーノードンをフラグノードンのオンポートにつなぐ |
このフラグノードンの出力は、この先の色んなプログラミングで使うことになるので、ワイヤー入口ノードンに繋いでワイヤー出口からシグナルを受け取れるようにしておきます。
| 手順 | やること |
|---|---|
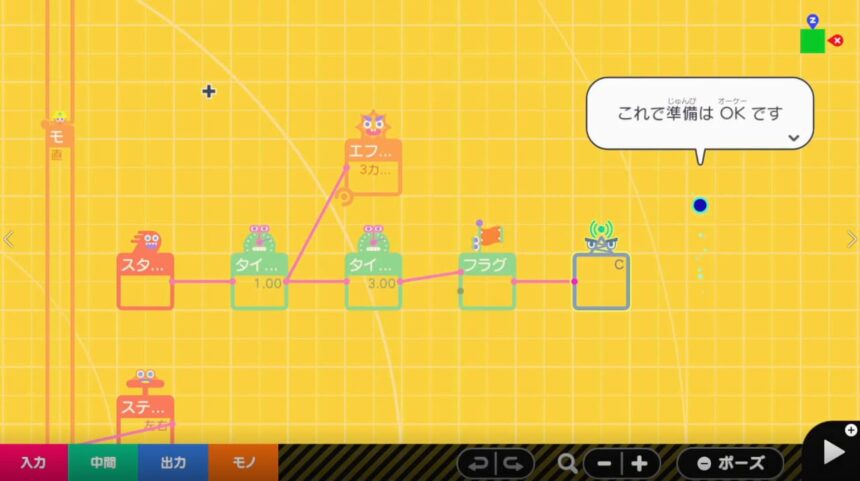
| 1 | 中間からワイヤーワープ入口ノードンを呼び出す |
| 2 | フラグノードンをワイヤーワープ入口ノードンとつなぐ |
| 3 | ワイヤーワープ入口の設定→ワープIDをCにする |
準備はOKです。次はいよいよクルマがカウントダウン終了まで走れないようにします。まずはプレイヤーのクルマから、カウントダウン終了までアクセルポートにシグナルが入力されないようにします。
カウントダウンが終了したかどうか、ワイヤーワープ出口ノードンを使って、フラグノードンのシグナルを伝えましょう。
ワイヤーワープ出口ノードンはカウントダウン終了までシグナルを出力しません。シグナルが出ていないということは出力されている数は0ということになります。ということは、アクセルポートに入力されている数とかけ算すれば、カウントダウン終了までアクセルポートにシグナルは入力されないということです。
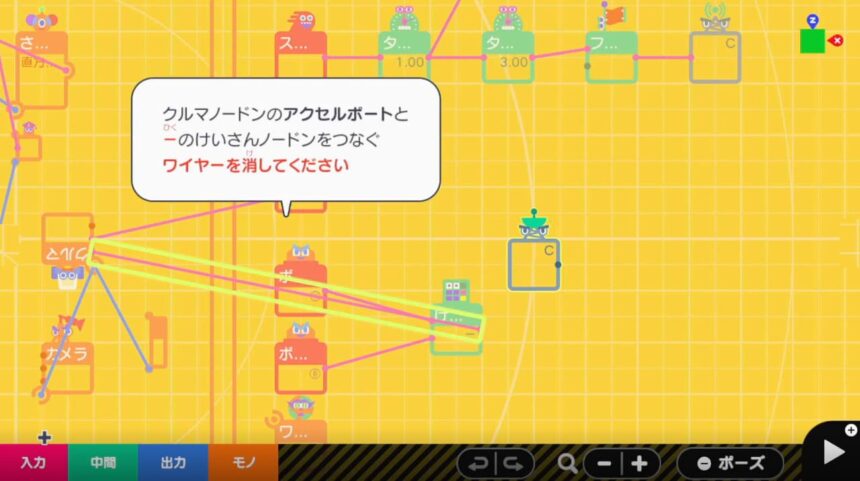
すでに登場している-のけいさんノードンのワイヤーを消して、×のけいさんノードンを新たに呼び出しましょう。
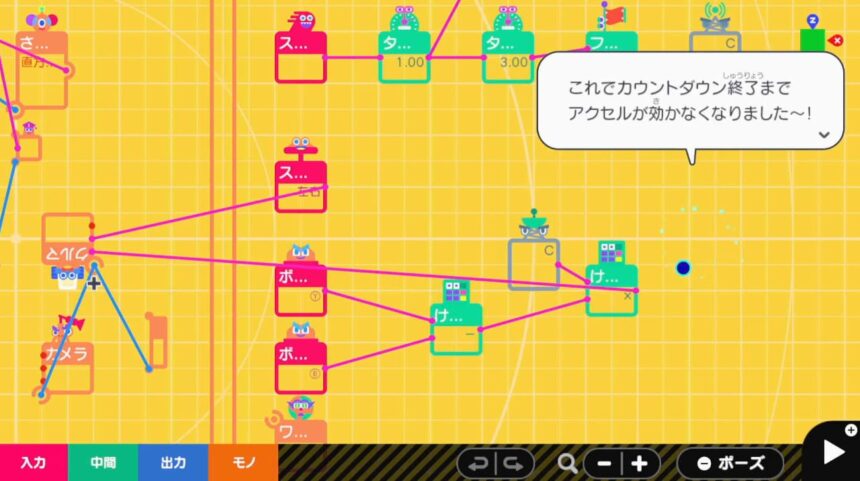
| 手順 | やること |
|---|---|
| 1 | -のけいさんノードンとクルマノードンをつなぐワイヤーを解除する |
| 2 | 中間から×のけいさんノードンを呼び出す |
| 3 | ワイヤーワープ出口(C)を×のけいさんノードンの入力1ポートにつなぐ |
| 4 | -のけいさんノードンの出力を×のけいさんノードンの入力2ポートにつなぐ |
| 5 | ×のけいさんノードンをクルマノードンのアクセルポートにつなぐ |
これでカウントダウンの間はYボタンを押してもクルマが動かないようになりました。カウントダウンが終わるまでプレイヤーは走れません。
対戦相手のクルマも同じようにプログラミングします。すでに仕組みが出来ているので、対戦相手の方はシンプルです。
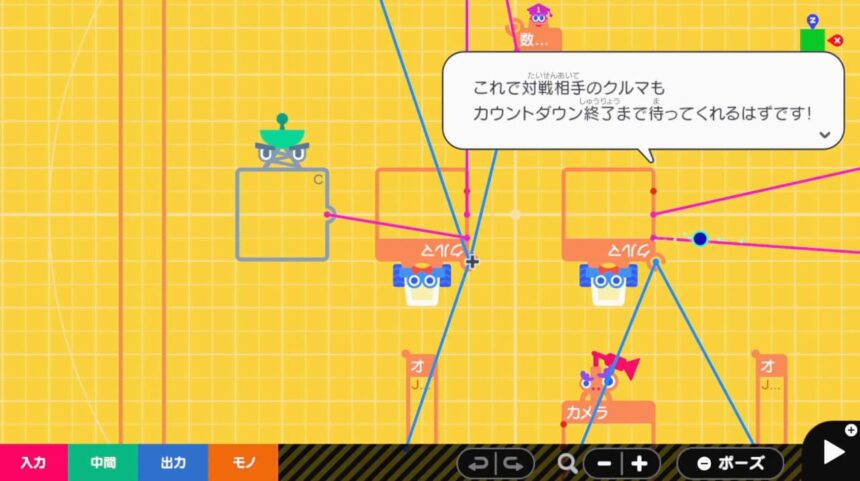
| 手順 | やること |
|---|---|
| 1 | 対戦相手のクルマとつながる定数ノードンを削除する |
| 2 | 中間からワイヤーワープ出口を出して設定→ワープIDをCにする |
| 3 | ワイヤーワープ出口と対戦相手のクルマノードンをつなぐ |
3秒待ってからフラグがオンになるフラグノードンのシグナルによって、対戦相手もカウントダウンが終わるまで動けなくなりました。
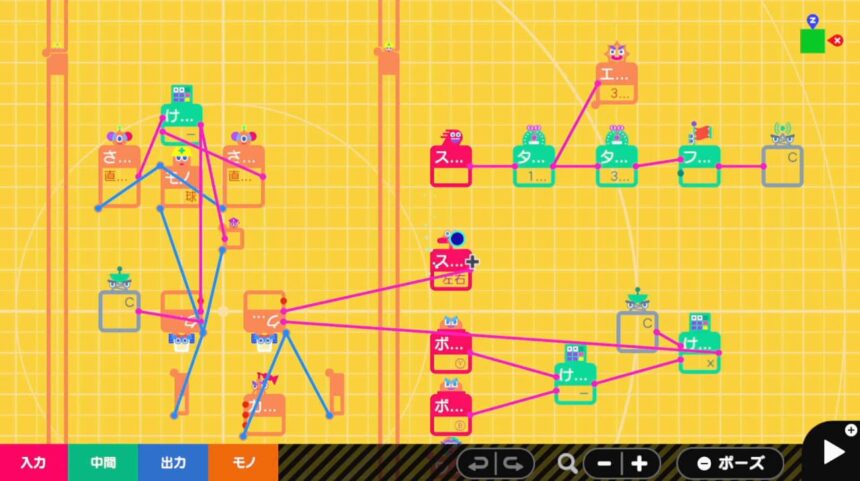
プレイヤーも対戦相手もカウントダウンを待つようになり、これでスタート前のカウントダウンは完成です。
ステップ7:ずるい?隠しワープ!
| ステップ7に登場するノードン | ||
|---|---|---|
 モノワープ入口 モノワープ入口 |
 モノワープ出口 モノワープ出口 |
オシャレなモノ |
ステップ7では隠しギミックとプログラムの整理をしていきます。どんな隠しギミックかというと、スタート地点の後ろにワープのショートカットを作って、簡単にゴール前まで行けるというちょっとズルい裏ワザです。
ワープのショートカット
| 手順 | やること |
|---|---|
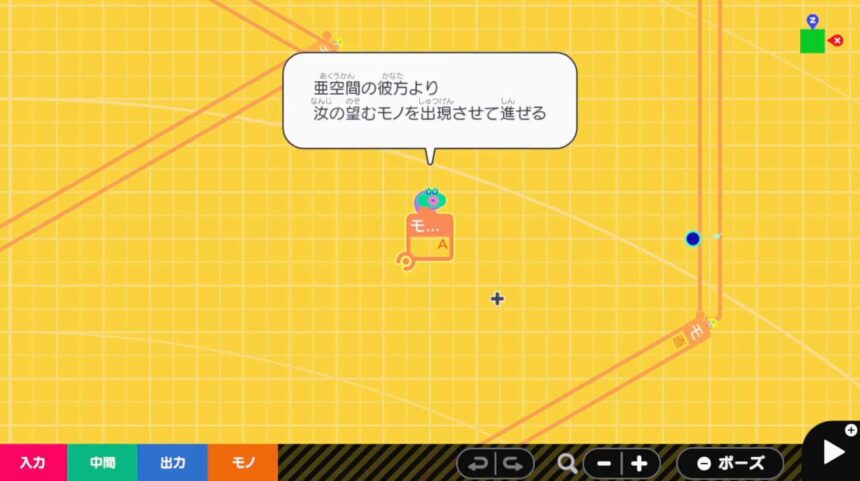
| 1 | モノからモノワープ入口ノードンを呼び出す |
| 2 | モノワープ入口の設定は、 └ふるまいの見えるをオフ └何をワープする?をクルマにする |
| 3 | モノからリンゴのオシャレなモノノードンを呼び出し、モノワープ入口に重ねる |
| 4 | オシャレなモノノードンの設定は、 └ふるまいは見えるだけオン └位置のYは0.60m └回転のX軸を90.00° |
ショートカットの入口の設定は以上でOKです。次は出口を設定します。
| 手順 | やること |
|---|---|
| 1 | モノからモノワープ出口を呼び出す |
| 2 | モノワープ出口の設定→ふるまいの見えるをオフ |
これでワープの完成です。プレイヤーのクルマはBボタンでバックしてワープに入り、一気にゴール前まで飛ぶことができます。
プログラムの整理
ゲームが完成に近づいてきたので、実際に遊ぶ時には不要なノードンを削除し、遊びやすい環境へと整えていきます。
| 手順 | やること |
|---|---|
| 1 | 対戦相手のクルマと繋がっている数つきモノノードンを削除する |
| 2 | 左のさわっているセンサーノードンの設定→ふるまいの見えるをオフ |
| 3 | 右のさわっているセンサーノードンの設定→ふるまいの見えるをオフ |
対戦相手から数つきモノや、センサーが消えてスッキリしましたね。
ステップ8:さいごのしあげ
| ステップ8に登場するノードン |
|---|
 BGM BGM |
いよいよ最後の仕上げです。これまでのレッスン同様に、見た目やBGMを改造して、自分だけのゲームを完成させましょう。
| 手順 | やること |
|---|---|
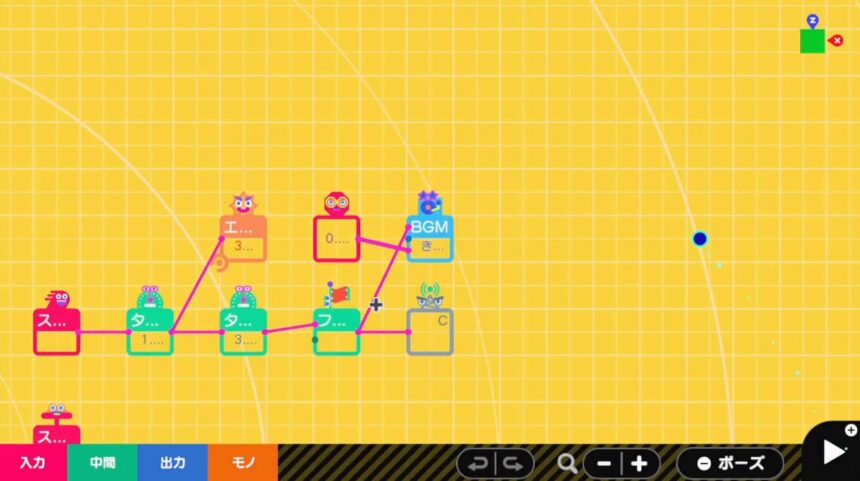
| 1 | 出力からBGMノードンを呼び出す |
| 2 | BGMノードンの設定→曲をきょうそうにする |
| 3 | フラグノードンの出力をBGMノードンの再生ポートにつなぐ |
フラグノードンと繋ぐことで、カウントダウン終了後からBGMが鳴るようになります。さらに一工夫して、BGMの再生速度も変えてみましょう。
| 手順 | やること |
|---|---|
| 1 | 入力から定数ノードンを呼び出す |
| 2 | 定数ノードンの数を0.95にする |
| 3 | 定数ノードンをBGMノードンの速度ポートにつなぐ |
BGMノードンの速度ポートに1.00より大きい数が入力されると再速度が速くなり、逆に1.00より小さい数が入力されると再生速度が遅くなります。今回は0.95にしたので、再生速度がちょっと遅くなります。
さあ、ここからは自由時間です。クルマやコースの見た目を変えたり、BGMを好きな曲に変えて速度もいじったりなどして、エキサイトレーシングを完成させてください。終わったら「できた」ボタンを押してレッスン6クリアです。
以上、レッスン6「エキサイトレーシング」の攻略情報でした。お疲れさまでした~!
ナビつきレッスン攻略一覧まとめはこちら。

本記事に使用しているゲーム画像や著作権および商標権、その他知的財産権は、当該コンテンツの提供元に帰属します。© Nintendo
コメント